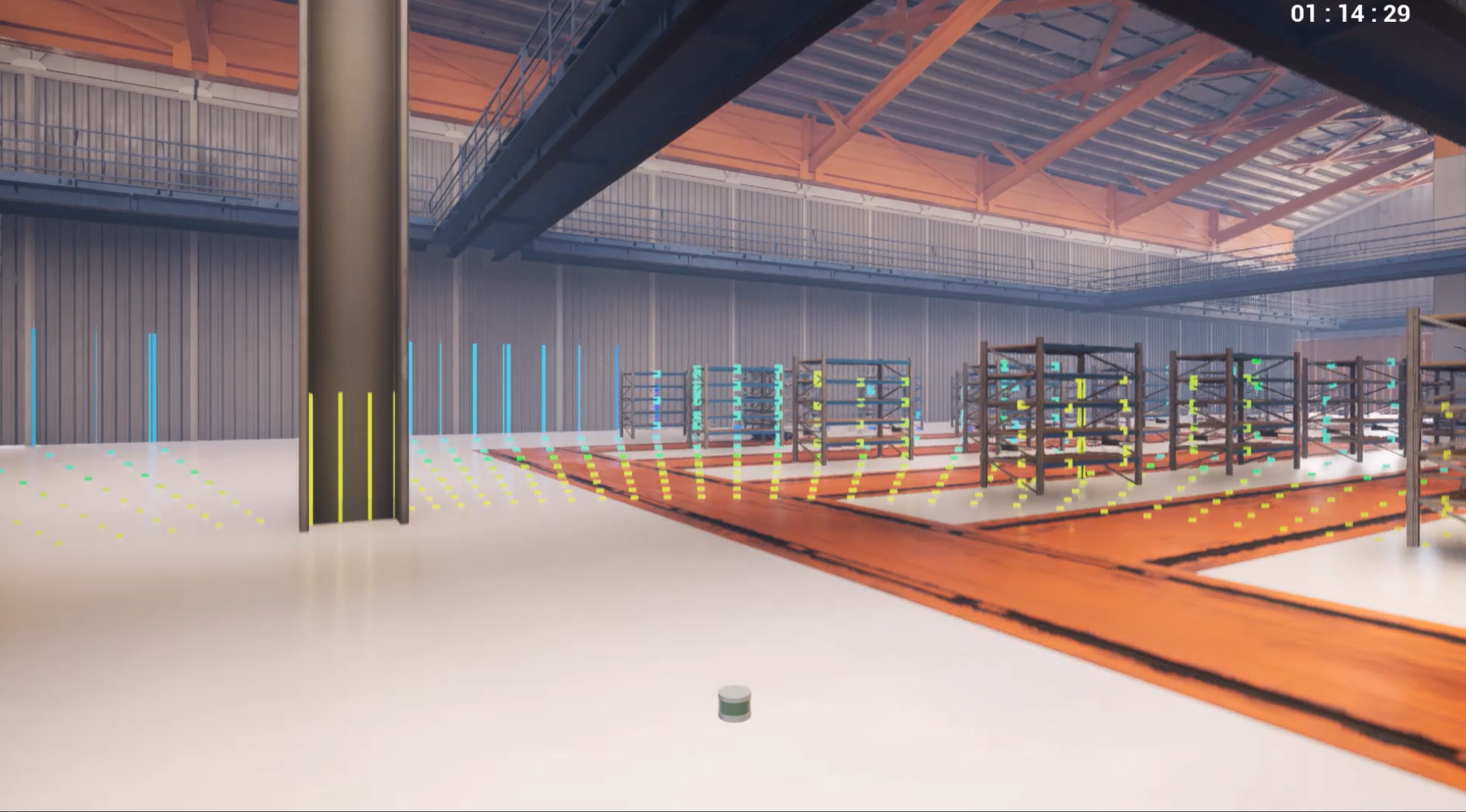
- Transit Optimal Platformは当社が開発した工場・倉庫向けリアルタイム3Dシミュレーションソフトウェアとなります。工場・倉庫運営におけるマテハン機器・人員配置、レイアウト等の評価検証といったシミュレーションや現場再現を目的としたデジタルツイン環境としても使用可能です。
- 物流に関する課題はお客様によって様々です。
- 既設工場におけるAGV の台数検討のみ行いたい。
- 日々レイアウトが変わる工場内での物流計画を考えたい。
- 工場の完全無人化を考えたい。
- 人との協調を前提とした物流最適化を行いたい。…等々
- 上記のような多種多様なご要望に対応するため、当ツールは物流シミュレーションにおける機能ライブラリをライセンス製品として提供し、リクエストに合わせて操作画面・出現オブジェクト・他システムとの連携部分の開発を実施しております。
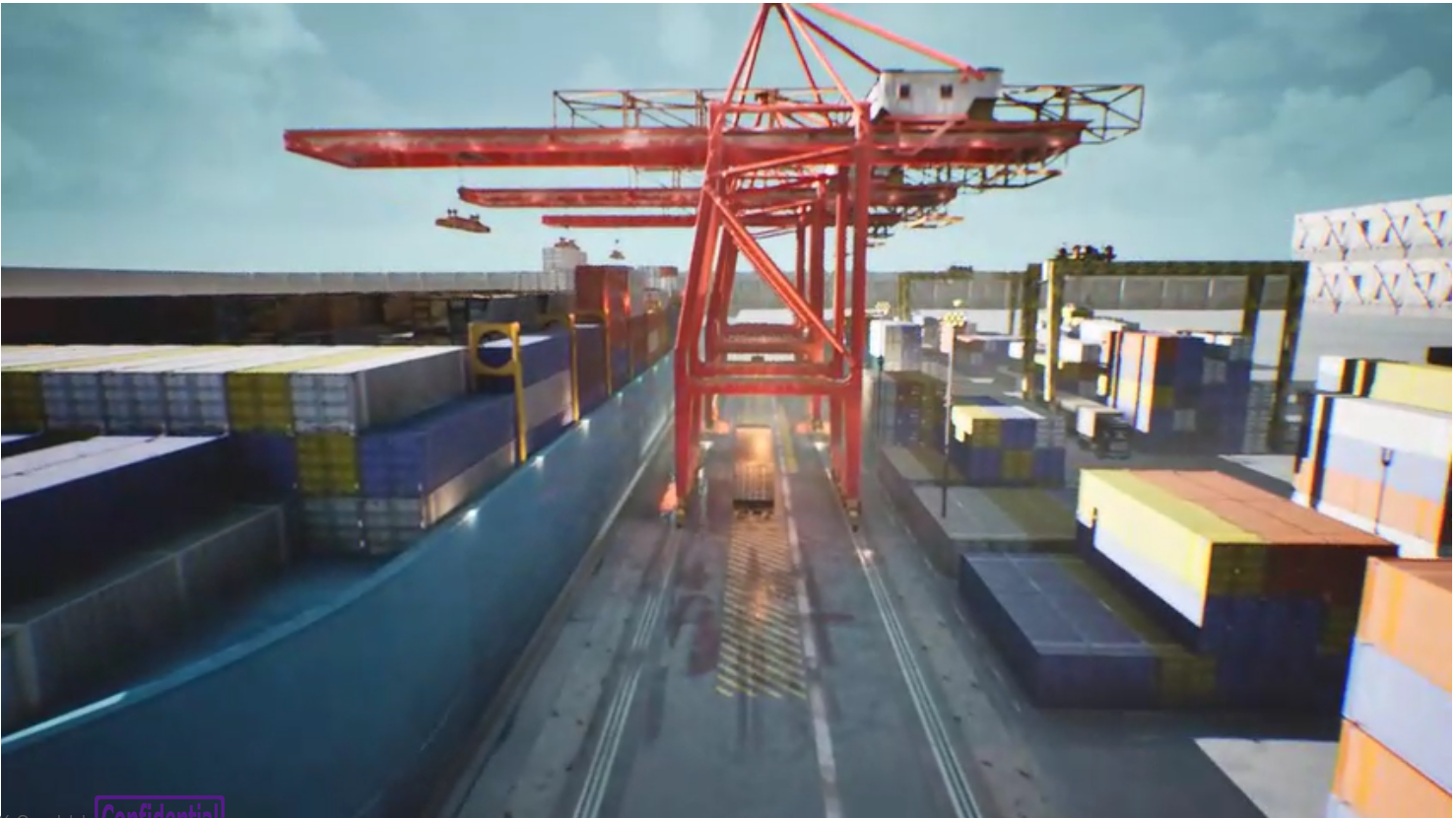
- また、工場・倉庫内だけでなく、建屋間配送など構内環境表現、空港や病院、港等様々な環境やオブジェクトを表現することができます。
ユースケース
-
シミュレーション(事前評価)
- AGV等のマテハン機器・センサー等の表現を行い、機器配置・スペック・運用評価を事前に実施することが可能です。
- また3Dの可視化が行えるため、マテハン機器をトータルで導入する際のクライアントとの設計確認、営業ツールとしても活用できます。
-
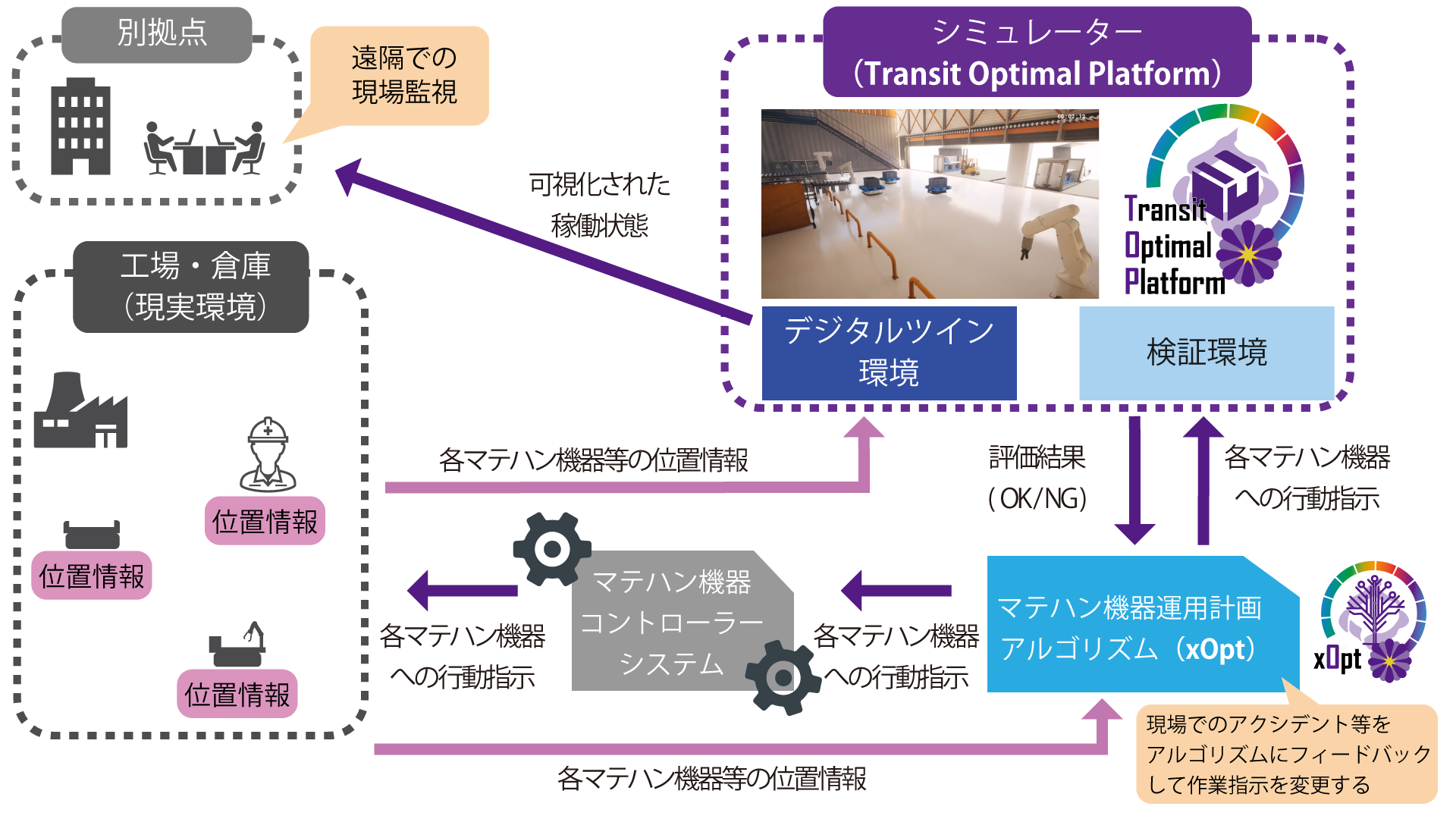
デジタルツイン(実機データ利用)
- マテハン機器実機から取得されたログ情報を3D環境上で再現することが可能です。
- 過去の稼働ログの可視化やリアルタイムでの可視化・遠隔拠点からの現場動作状況のモニタリング等にも対応可能です。
-
AIの学習環境
- 外部システムとの連携が可能なため、ユーザー独自で構築したマテハン機器運用計画システム(RCS等)と連携することが可能です。
- また、強化学習などAIの学習環境としても活用いただけます。
【デモ事例】
出展イベント
内容 【Transit Optimal Platform×AGV実機によるデジタルツインデモ】
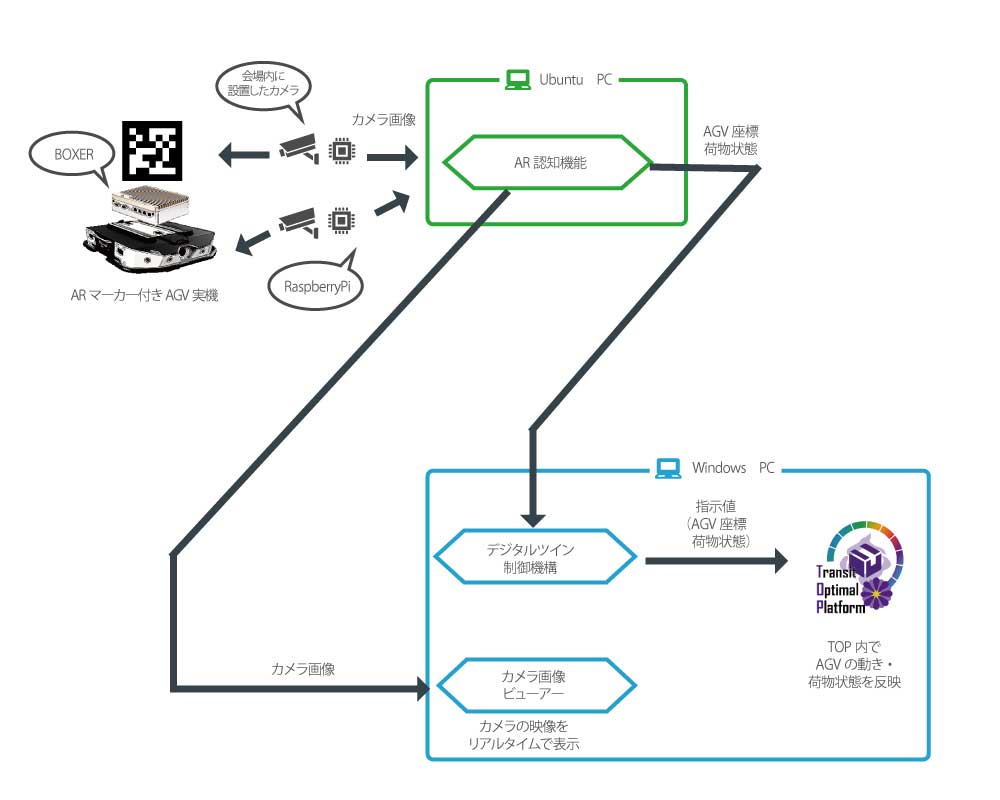
- Transit Optimal PlatformとAgileX Robotics社TRACER実機を連携させたデジタルツインデモ。
- ブース内を走行するAGVの上部にARマーカーを設置し、壁上部に設置しているカメラでARマーカーを読み取ることでAGVの位置情報を取得。
- Transit Optimal Platform上でブースを模したマップを作成し、上記で取得したAGVの情報をTransit Optimal Platform上に反映。
- ARマーカー付きの荷物をAGVに載せると、Transit Optimal Platform上のAGVも荷物が載っている状態となる。
- カメラのリアルタイム映像はTransit Optimal Platform上のボタンを操作することで確認することができ、リモート監視の要求を満たすことができる。
- AGVはAgileX Robotics社TRACERを使用し、TRACERの自立制御は積載したAAEON社のエッジデバイスであるBOXERにSLAMを組み込んで行っている。