Overview
Transit Optimal Platform is a real-time 3D simulation software for factories and warehouses developed by iPX. It can also be used as a digital twin environment for the purpose of simulation and on-site reproduction such as evaluation and verification of material handling equipment, personnel allocation, layout, etc. in factory / warehouse operation.
Each customer faces a different problem related to logistics.

- We want to be able to verify the number of AGVs in existing factories.
- We want to plan logistics in factories where the layout changes from day to day.
- We want to make our factory completely unmanned.
- We want to optimize logistics premised on coordination with human
beings. … etc.
In order to meet the diverse needs such as the above, iPX provides this tool as a licensed product of the function set for logistics simulation, and develops operation screens, appearance objects, and linkage with other systems according to your request.
In addition to the inside of factories and warehouses, it can also be used to represent various environments and objects such as inter-building deliveries, airports, hospitals, ports, and other premises.

Examples of Usage
Simulation (preliminary evaluation)
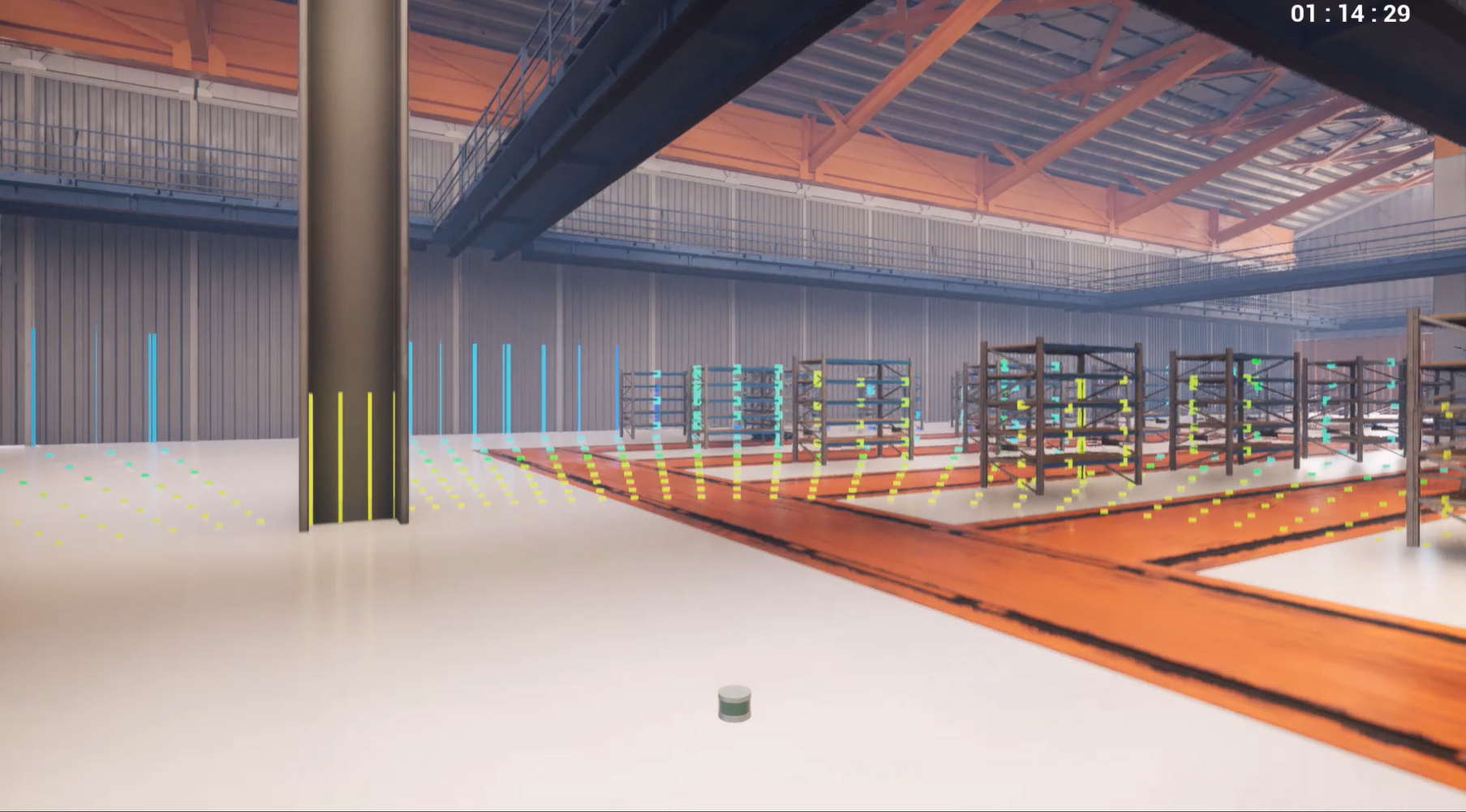
It is possible to express material handling equipment such as AGV, sensors, etc., and implement equipment layout, specifications, and operation evaluation in advance.
In addition, since it can be visualized in 3D, it can be used as a sales tool as well as design confirmation with clients when introducing material handling equipment as a whole.
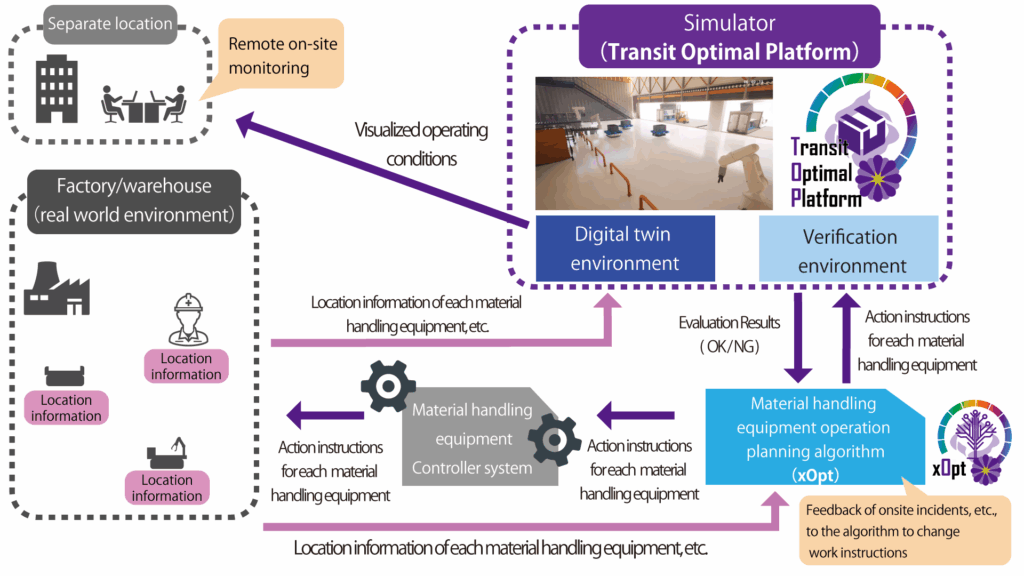
Digital twin (using actual machine data)
It is possible to reproduce the log information obtained from the actual material handling equipment in a 3D environment.
It is also possible to visualize past operation logs, visualize in real time, and monitor the on-site operation status from a remote location.
Learning environment for AI
Since it is possible to link with external systems, it is possible to link with a material handling equipment operation planning system (RCS, etc.) built by the user.
It can also be used as a learning environment for AI such as reinforcement learning.
Video
Example of Demonstration
Exhibition event
Smart Factory EXPO (January 2022)
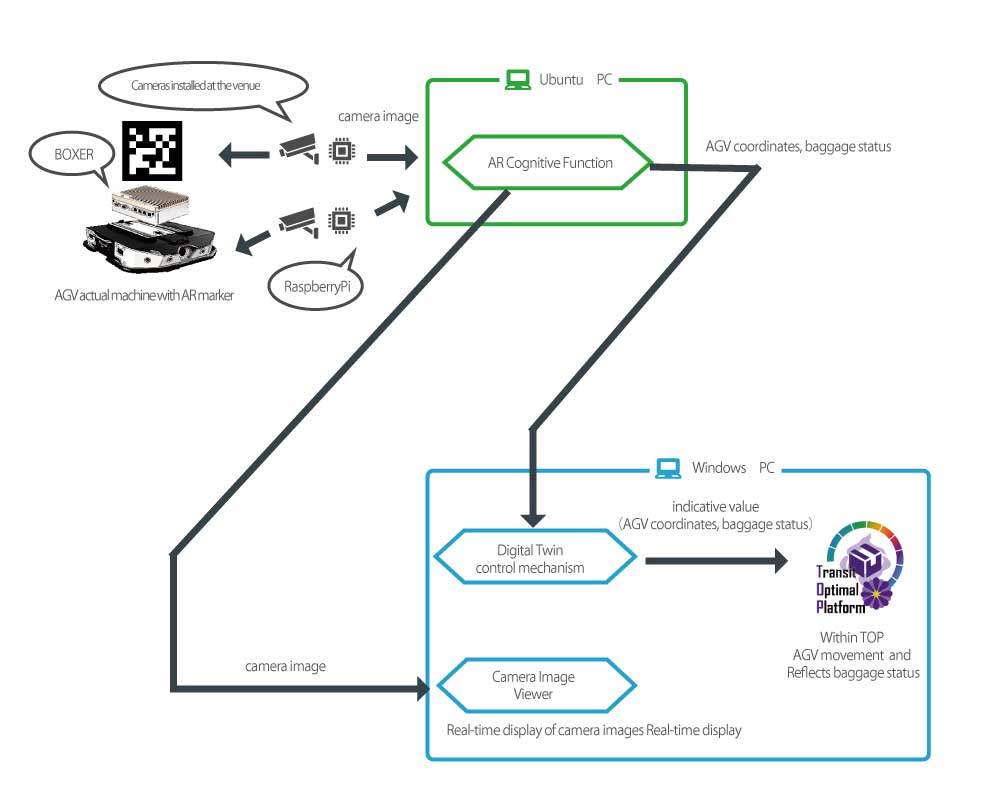
Content – Digital twinning demonstration using Transit Optimal Platform x real AGV
Digital twinning demonstration linking actual tracers of Transit Optimal Platform and AgileX Robotics.
Positional information was acquired from an AGV running in the booth by using a camera mounted on the wall to read an AR marker mounted on the top of the AGV.
An imitation map of the booth was created on Transit Optimal Platform and the above acquired AGV information reflected in the platform.
When a payload with an AR marker attached is loaded on an AGV, the AGV in the Transit Optimal Platform is also shown with a payload loaded.
Real time camera images can be checked by operating buttons on the Transit Optimal Platform, making it possible to satisfy requirements for remote monitoring.
AGVs use the AgileX Robotics tracer, and the tracer’s independent control system incorporates SLAM in a built-in BOXER, an edge device manufactured by AAEON.