
Overview
xOpt is optimal plan automatic generation software that generates route and action plans for multiple material handling equipment such as AGVs.
It can be incorporated into other systems such as the “Transit Optimal Platform” (existing controller systems, etc.).
Computed outputs of xOpt
- Task assignment for each mobile
- Path of each mobile
- Action (speed/behavior) of each mobile
Features
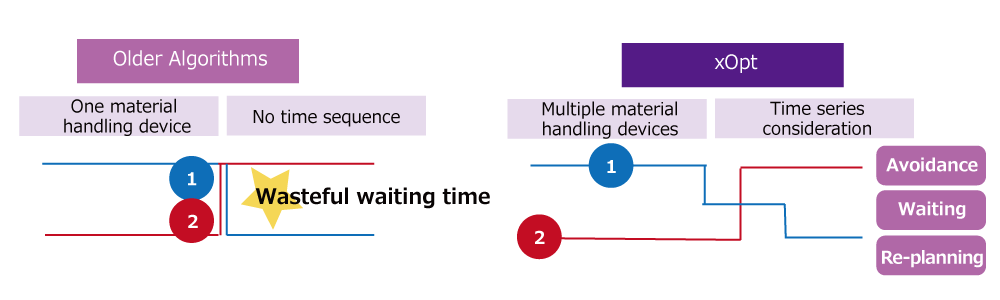
- 1. Overall optimization of multiple agents (target material handling equipments) and multiple tasks is possible
-
The route generation algorithm that has been popular for a long time is an optimization that uses only one agent and does not consider the time series, but xOpt performs the shortest path / action plan for multiple units, and performs optimization assist considering the time / other agents speed.
*Utilization rate of material handling equipment
- It is also possible to perform energy management by incorporating the concepts of fuel efficiency and power consumption
- Can express speed attenuation when loading parts
- 2. Target vehicle speed can be determined according to the distance between vehicles
- 3. Standby operation is also set in special situations such as loading and unloading
- 4. If you get too close to another vehicle, The algorithm calculates the deceleration / stop.
-
*More optimized task assignment
- Instead of automatically allocating tasks based on their positional relationship, actually assign tasks and adopt the most optimal allocation order
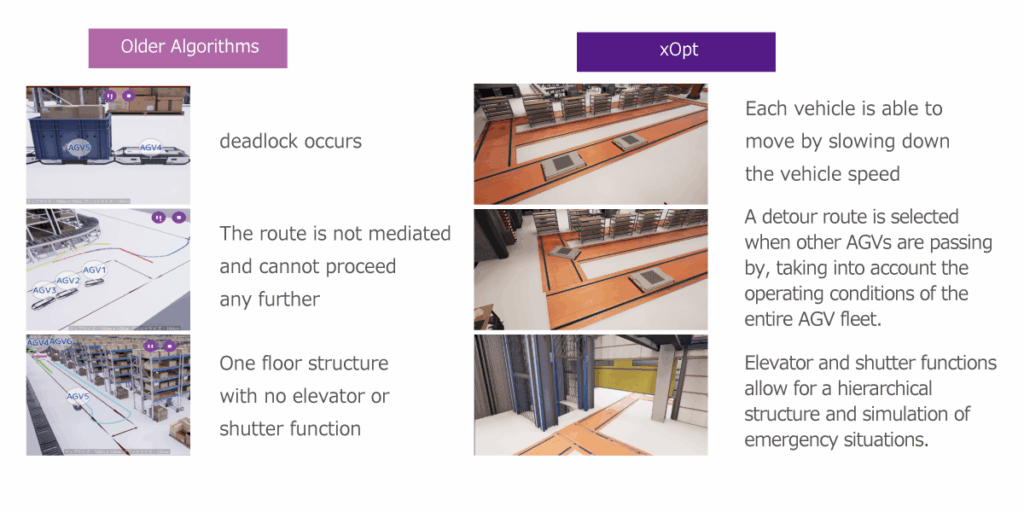
- 5. Elevators and shutters functions can be added as options
- 6. Since it is provided as a module, it can be incorporated into other systems (existing controller systems, etc.)
Comparison of existing software
Video
*This video is provided in Japanese.