出展活動
汽車世界2020(2020年1月)
內容
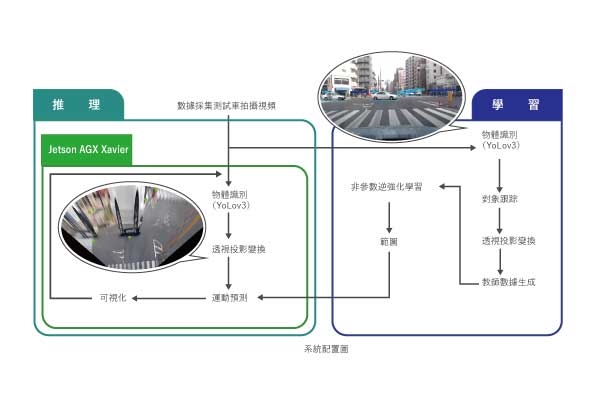
在交叉路口場景中,使用其他車輛的軌道預測來估計安全區域。
在其他車輛/人類軌道預測中,使用反向強化學習進行預測。使用基於非參數貝葉斯的演算法作為元素技術,實現了以下優點。
- 接近人類感官的預測
- 學習數據比常規深度學習或概率模型少
- 可在邊緣設備上處理
- 可以分析輸出推理結果的原因
- 不需要人類給出參數,模型本身
使用的工具
演算法 : ddBNIRL
邊緣設備 : NVIDIA Jetson AGX Xavier

綠色部分 : 其他車輛軌道預測結果
汽車世界2020(2020年1月)
在交叉路口場景中,使用其他車輛的軌道預測來估計安全區域。
在其他車輛/人類軌道預測中,使用反向強化學習進行預測。使用基於非參數貝葉斯的演算法作為元素技術,實現了以下優點。
演算法 : ddBNIRL
邊緣設備 : NVIDIA Jetson AGX Xavier
綠色部分 : 其他車輛軌道預測結果
