出展活動
汽車世界2020(2020年1月)
內容
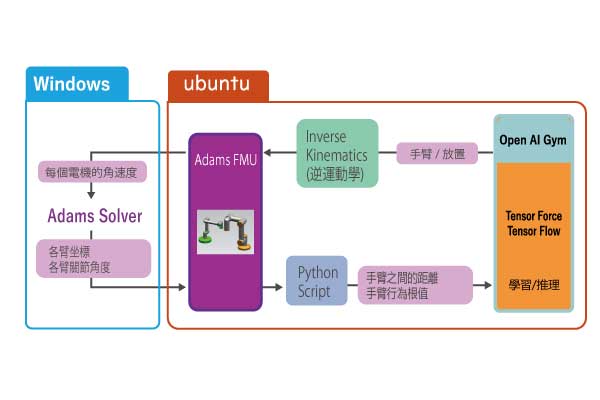
通過強化學習實施工業機械臂的協調控制。
主題:假設在點焊等情況下移動,兩個臂在3D空間中移動到焊接點,同時避免彼此自由移動。
進行搜索,使前端部分的位置接近目標地點,從前端部分的位置使用反向運動學(反向運動學)求出各關節部的角度,以成為一定的速度的方式作為角速度給予控制。
目的是通過教學和Adams模擬來分析電機尺寸和執行器等力的傳輸,以優化零件。
汽車世界2020(2020年1月)
通過強化學習實施工業機械臂的協調控制。
主題:假設在點焊等情況下移動,兩個臂在3D空間中移動到焊接點,同時避免彼此自由移動。
進行搜索,使前端部分的位置接近目標地點,從前端部分的位置使用反向運動學(反向運動學)求出各關節部的角度,以成為一定的速度的方式作為角速度給予控制。
目的是通過教學和Adams模擬來分析電機尺寸和執行器等力的傳輸,以優化零件。
