Exhibition event
Automotive World 2020 (January 2020)
Contents
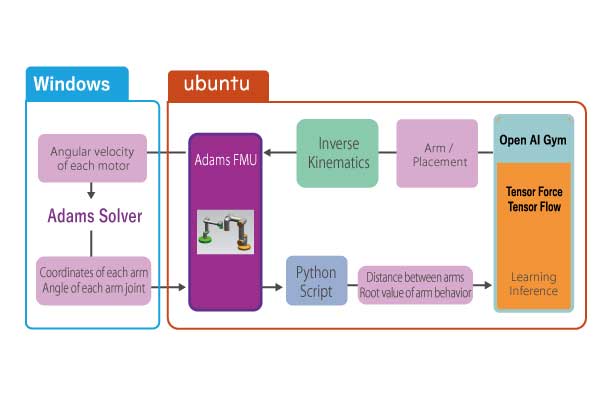
Reinforcement Learning for Cooperative Control of Industrial Robot Arms.
Subject: Assuming that the robot arm will be moved in a situation such as spot welding, two arms move to the welding point while avoiding each other in a 3D space where they can move freely.
Searching for the position of the tip of the arm so that it approaches the target point, and using inverse kinematics (Inverse Kinematics) to determine the angle of each joint from the position of the tip, and controlling it by giving it an angular velocity to achieve a certain speed.
The purpose is to optimize parts by analyzing motor size, actuators, and force transmission together without teaching by simulating with Adams.