出展イベント
オートモーティブワールド2020(2020年1月)
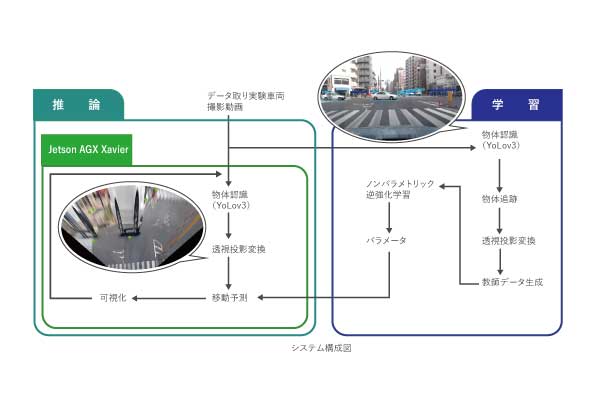
内容
交差点シーンにおいて他車両の軌道予測 を用いた安全領域の推定を行う。
他車両/人間の軌道予測では、逆強化学習を用いて予測を実施する。このときノンパラメトリックベイジアンベースのアルゴリズムを要素技術として用いることで、以下の利点を実現する。
- 人間の感覚に近い予測が可能
- 学習データが通常のDeepLearningや、確率モデルよりも少ない
- エッジデバイスで処理できる
- 何を以て推論結果を出力したか解析可能
- 人間がパラメータを与えてやる必要が無く、モデル自身で判断
使用ツール
アルゴリズム:ddBNIRL
エッジデバイス:NVIDIA Jetson AGX Xavier

緑色部分:他車両軌道予測結果